

For more than a century, the United States has organized transportation policy, infrastructure investment, and safety oversight around distinct modal domains. Aviation, surface transportation, maritime operations, and rail each evolved with their own governance structures, technical standards, and operational assumptions. That stratified model served the nation well when transportation systems were largely human‑operated, geographically bounded, and technologically independent.
That era is ending.
The convergence of automation, autonomy, and digital connectivity is exposing the limits of a domain‑by‑domain approach to transportation modernization.1 Safety, scalability, and public trust long treated as modal responsibilities are now increasingly dependent on shared digital services, interoperable data architectures, and federated operational models that span air, ground, and the built environment.2 Recent federal policy signals, research investments, and operational frameworks point to a clear conclusion: America’s transportation future and continued leadership will not be secured through incremental upgrades within isolated silos. It will be shaped by the deliberate development of a cross‑domain digital infrastructure that treats information, trust, and coordination as a foundational standard for modern operations.
This shift is not speculative. It is already underway.
Autonomy and the End of the Stratified Domain Model
For much of the last century, transportation safety depended on tightly coupled systems within distinct domains. Aviation safety was achieved through centralized air traffic control, certified aircraft, and standardized procedures under Federal Aviation Administration (FAA) oversight. Roadway safety relied on physical separation, signage, and human judgment, overseen by Federal Highway Administration (FHWA), the National Highway Traffic Safety Administration (NHTSA), and the Federal Motor Carrier Safety Administration (FMCSA). Likewise, America’s public transit and railway systems are overseen by Federal Transit Administration (FTA) and Federal Railroad Administration (FRA). Each domain and its governance optimized its own technologies, risks, and institutions, largely in isolation.
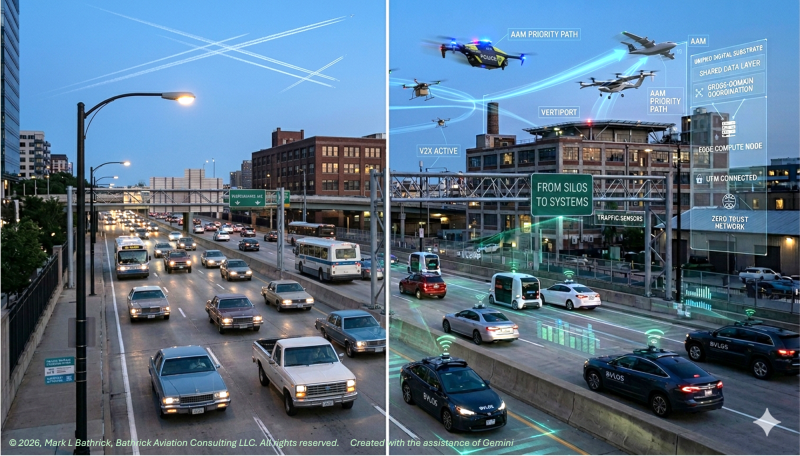
Autonomy has ended that equilibrium. The historical separation of domains made it reasonable to build distinct road, aviation, and building infrastructure. Roads served human drivers, aviation operated well above the built environment, and buildings were mostly passive. Autonomy collapses these boundaries by turning vehicles and infrastructure into networked, data-driven systems that must sense, decide, and coordinate in real time within shared physical space. The constraint is no longer the vehicle; it is the digital substrate that increasingly connects vehicles to each other and to the built world.
Ground autonomy matured first because it could scale within existing roads as the digital layer improved. Advanced Driver Assistance Systems (ADAS)3 are now mainstream, with safety features reaching very high penetration in new vehicles by 2023 (e.g., forward collision warning, automatic emergency braking, pedestrian detection warning, pedestrian AEB, and lane departure warning all reported in the low-90% range in the PARTS dataset).4 Even without full autonomy, these systems are autonomy-adjacent: they depend on continuous sensing, onboard compute, software updates, high-integrity positioning, and growing connectivity for maps, hazards, and fleet learning. SAE J3016 makes clear that even Levels 1–2 automation performs sustained portions of the driving task, driving persistent demand for edge sensing and compute.5 The roadway system has effectively become a rolling distributed network, pulling communications, edge compute, and cybersecurity infrastructure along with it.
At the same time, the “built world” is becoming intelligent, instrumented, and connected, turning cities, corridors, and buildings into active participants in mobility. This smart infrastructure, near-edge compute in fixed assets, far-edge compute in vehicles, hybrid-cloud data management, and resilient connectivity is what makes autonomy viable at scale.6 As noted in a digital infrastructure briefing at the 2022 Business of Automated Mobility Forum, growth depends on ground, air, and smart-city systems sharing digital infrastructure, because infrastructure is costly and slow to change after it has been installed.”7
Autonomy forces convergence, and convergence punishes fragmentation.
Nowhere is this more evident than in aviation. For over a century, aviation and surface mobility remained operationally separate because aircraft largely operated far above the built environment. That separation allowed aviation systems to evolve nationally while roads remained local and state-managed. Drones invert that model. Small Unmanned Aerial Systems (UAS) operations are predominantly concentrated in the low-altitude layer, generally below 400 feet above ground level (AGL). These operations are directly above densely populated areas with roads, buildings, and critical infrastructure. Interestingly, the scale of UAS operations has shifted, as evidenced by the FAA’s current “By the Numbers” data, which shows a total of 837,513 registered drones and 481,760 certificated remote pilots.8 Meanwhile, the FAA civil aircraft registry reflects on the order of ~310,000 FAA-registered aircraft (active registrations slightly lower),9 and FAA’s civil airmen statistics show roughly ~503,275 certificated pilots (excluding students) as of year-end 2024.10 Put plainly: the low-altitude ecosystem now contains a comparable or larger population of operators than traditional pilot populations, and it is growing inside the same communities where roads, buildings, and critical infrastructure already compete for spectrum, bandwidth, and cyber defense.
This is why the emerging BVLOS framework represents more than regulatory progress. It marks an economic phase change for the low-altitude economy.11 The FAA’s proposed performance-based rules aim to normalize routine BVLOS operations and the third-party services that support them, including UAS Traffic Management (UTM). BVLOS enables persistent operations such as infrastructure inspection, distributed logistics, public safety response, and industrial workflows. Once routine, low-altitude airspace becomes a production environment, inheriting the same expectations as other critical mobility systems: continuous monitoring, authenticated identity, resilient communications, cyber-hardening, and coordinated incident response.
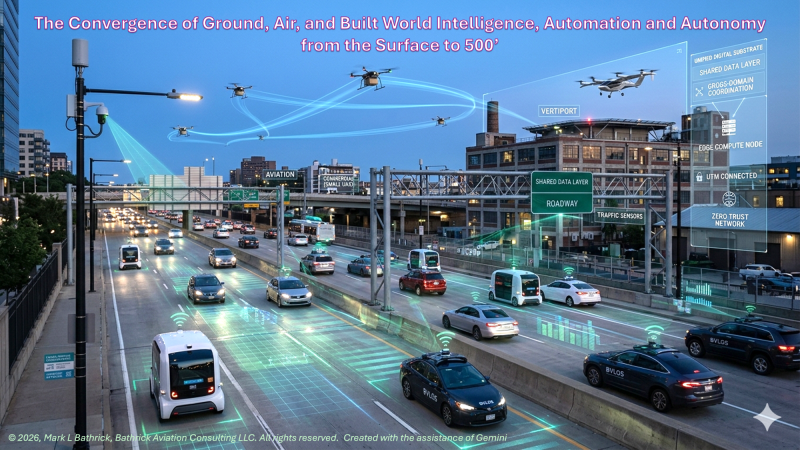
The final convergence is unavoidable. Autonomous ground vehicles, an increasingly intelligent built world, and a rapidly growing population of UAS, and soon AAM aircraft now operate in close proximity and depend on the same digital capabilities: vehicle-to-infrastructure and vehicle-to-vehicle connectivity,12 mobile and fixed edge compute, hybrid-cloud data management, AI-enabled analytics, Zero Trust security, and scalable, resilient architectures.
At the core of that shared digital substrate are a set of common infrastructure layers that must work consistently across roadways, cities, and low‑altitude airspace: (1) connectivity and communications that provide resilient real‑time links (terrestrial, satellite, mesh, edge‑to‑cloud) for command, coordination, and data sharing; (2) positioning and navigation services that enable precise, trusted geolocation and 3D spatial awareness; (3) identity and authorization services that establish who or what is on the network and what it is permitted to do; (4) data exchange and interoperability frameworks that standardize secure information flows among public and private systems; (5) a cybersecurity and resilience fabric that hardens those links and services against disruption; (6) sensing and situational awareness networks that fuse surveillance, IoT, and environmental data into a shared operational picture; (7) edge and cloud compute infrastructure that distributes processing for autonomy, analytics, and assurance; (8) energy and charging ecosystems that support electrified mobility nodes (vehicles, corridors, vertiports) through smart-grid integration; and (9) governance and standards platforms that align policy, certification, and operating rules so these layers can be trusted and reused across domains.
The siloed, domain-specific infrastructure model worked when domains were physically separated. Autonomy ends that separation. The future is necessarily cross-domain: a shared digital substrate supporting roadway autonomy, smart infrastructure, and low-altitude aviation together, because they are now co-located, interdependent, and mutually vulnerable.
DOT’s Transportation Digital Infrastructure RFI: A Structural Signal
The U.S. Department of Transportation’s (DOT) 2026 Transportation Digital Infrastructure (TDI) Request for Information (RFI) represents a pivotal acknowledgment of this reality.13 It explicitly seeks a national strategy for digital infrastructure that operates across all transportation modes, supports safety‑critical operations, enables autonomy at scale, and remains resilient to cyber threats.14
What distinguishes this RFI from prior modernization efforts is its framing. Rather than focusing on vehicles or platforms, DOT elevates digital infrastructure data exchange, interoperability, cybersecurity, and governance as the foundation of future transportation safety and performance. The RFI signals a federal pivot from platform‑centric modernization to infrastructure‑centric modernization, where safety and scalability are achieved through shared digital services rather than isolated systems.
For aviation stakeholders, the implications are profound. The RFI aligns closely with challenges already confronting the National Airspace System (NAS): how to scale safety in a data‑rich, autonomy‑enabled environment; how to assure trust across distributed actors; and how to certify systems that are no longer monolithic but composed of interoperable services.
The need for cross-domain digital infrastructure has been articulated by influential organizations for years but lacked a clear federal champion. Industry leaders, research institutions, and public-interest organizations like the Autonomy Institute, ITS America, and the Open Mobility Foundation have consistently argued that autonomy, safety, and scalability depend on shared digital services across air, ground, and the built environment.15 16 17These efforts, dating back to 2019, framed digital infrastructure as a public good, emphasizing interoperability, governance, and trust. The TDI RFI is unique because it represents the first time the federal government has explicitly prioritized cross-domain digital infrastructure as a national strategic priority. This elevates ideas from the margins to credible policy pathways, potentially reshaping transportation planning, procurement, and governance.18
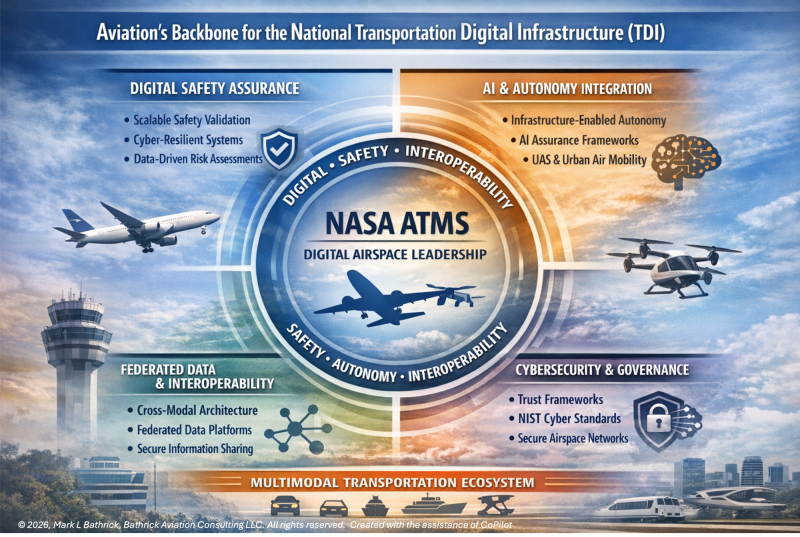
NASA ATMS: Aviation’s Digital Infrastructure Laboratory
Within the broader national context, NASA’s Air Traffic Management and Safety (ATMS) project, which is focused on “transforming the aviation system for today and tomorrow by enabling faster, safer, and more resilient operations through automation,”19 gains renewed strategic importance. Initially perceived as aviation-specific research programs, these efforts are increasingly resembling a pre-operational laboratory for digital transportation infrastructure.20
Nowhere is the need for true cross‑domain thinking with ATMS more urgent than in the effort to prevent deadly runway incursions.21 The recent fatal collision at LaGuardia Airport, where a ground vehicle and an aircraft entered the same runway environment with catastrophic consequences22 underscores that runway safety is not an “aviation‑only” problem; it is a shared‑domain problem involving aircraft, ground vehicles, surface operations, and the built environment. To be successful here, ATMS will need to look beyond aircraft-centric technologies. Many costly mishaps involve conflicts between ground vehicles and aircraft on the ground.23 24A cross-domain digital infrastructure approach is uniquely suited to address this challenge. It enables integrated sensing, shared situational awareness, authenticated identity, and coordinated alerting across aircraft, ground vehicles, and airport infrastructure. This approach not only reduces aircraft-to-aircraft incursions but also mitigates the far more common and equally hazardous ground-vehicle-to-ground-vehicle and ground-vehicle-to-aircraft collisions.25
Addressing this kind of multi‑domain operational risk is precisely the challenge the ATMS framework was designed to confront. Within that framework, the Hollister Airspace Ecosystem (HAE) serves as a pre-operational laboratory for evaluating service-oriented digital infrastructure in an operationally representative environment.26 27It demonstrates how federated digital services and shared situational awareness can enable scalable, trustworthy airspace operations across diverse applications.28
NASA’s work on Unmanned Aircraft System Traffic Management (UTM), Digital Information Platforms (DIP), and federated autonomy has consistently emphasized system‑of‑systems safety, distributed decision‑making, and infrastructure‑mediated assurance. Rather than assuming centralized control or vehicle‑contained intelligence, ATMS research explores how shared services, standardized data exchanges, and performance‑based requirements can enable scalable operations without compromising safety. NASA’s research on how people respond to air taxi noise is another example of how they have reached across the domains.29
This approach mirrors the priorities articulated in the DOT TDI RFI. Both recognize that safety in complex, autonomous environments emerges from the interaction of systems, not from any single component. Both emphasize the need for assurance frameworks that account for latency, data integrity, and cyber resilience as operational risks.
Vertiports and the Built Environment: Where Domains and Digital Infrastructure Converge
Nowhere is the need for cross‑domain thinking more evident than in the planning and deployment of vertiports. Often discussed as aviation facilities, vertiports are in practice multi-modal nodes within a broader digital transportation network.30 31 Their safe and efficient operation depends on energy infrastructure, surface access, weather sensing, cybersecurity, and integration with local planning and zoning authorities.
Federal guidance on vertiport design increasingly acknowledges these dependencies, emphasizing performance‑based standards, electrical infrastructure, and interoperability with surrounding systems.32 High‑density vertiport concepts of operations further illustrate how surface movements, charging operations, and airspace coordination must be managed as a unified system rather than as discrete functions.33
Treating vertiports as isolated aviation assets risks repeating the mistakes of past infrastructure investments building facilities that cannot scale, interoperate, or adapt to evolving operational demands. A cross‑domain digital infrastructure approach, by contrast, enables planners to align aviation, surface transportation, and urban development from the outset.
Cybersecurity and Data Governance as Cross-Domain Safety Enablers
As transportation systems become more digitally interconnected, cybersecurity and data governance emerge as central safety concerns. The DOT TDI RFI explicitly links cyber resilience and data governance to operational safety, echoing findings from GAO, OSTP, and other federal bodies that cyber vulnerabilities can translate directly into physical risk.34 35
Aviation’s experience with ADS‑B vulnerabilities,36 broadcast Remote Identification (RID),37 and federated data sharing provides valuable lessons for the broader transportation ecosystem. Trust frameworks, role‑based access controls, and secure information exchange are not ancillary features; they are foundational to maintaining separation, prioritization, and emergency response in autonomous environments.
Here again, a stratified approach falls short. Cyber threats do not respect modal boundaries, and neither can mitigation strategies.38 A unified digital infrastructure strategy allows for consistent threat modeling, shared assurance practices, and coordinated response across domains.
Securing the Low‑Altitude Airspace: Why Cross‑Domain Digital Infrastructure Is Now a National C-UAS Security Imperative
The rapid expansion of low‑altitude operations has introduced a security challenge that cannot be addressed through traditional aviation or ground‑based approaches alone. Small drones, advanced air mobility vehicles, and increasingly autonomous surface systems now operate in shared physical and digital environments. The resulting threat landscape ranging from negligent operations to deliberate misuse demands a fundamentally different approach to airspace security that begins with universal air domain awareness.39 40 41

Counter‑UAS capabilities have historically been developed as point solutions: radar systems, radio‑frequency detectors, electro‑optical sensors, or kinetic and non‑kinetic defeat mechanisms deployed in isolation. While effective in limited contexts, these systems struggle to scale in civilian environments where safety, privacy, and continuity of operations must be preserved to ensure public trust and acceptance.42
A cross‑domain digital infrastructure enables C‑UAS to evolve from isolated tools into integrated systems of systems.43 By fusing data from aviation surveillance, surface sensors, communications networks, Remote ID services, and municipal infrastructure, authorities can distinguish between cooperative, non‑cooperative, and malicious actors with far greater precision. This integration allows security responses to be proportional and targeted, reducing the risk of collateral and potentially catastrophic disruption to legitimate aviation and public safety operations.44
Scaling Drone as a First Responder (DFR): Infrastructure, Not Aircraft, Is the Limiting Factor
Drone as a First Responder (DFR) programs have demonstrated clear operational value.45 Public safety agencies across the United States now routinely deploy drones to provide rapid situational awareness for 911 calls, search and rescue operations, fire response, and disaster assessment. These programs reduce response times, improve responder and the public’s safety, and enhance critical decision‑making under pressure.

Effective DFR operations rely on reliable communications, real-time airspace awareness, integration with dispatch systems, and coordination with other airspace users. Their inherent connection between the air and the ground has become another compelling reason for an integrated, cross-domain digital architecture. However, in many jurisdictions, these elements are often assembled through bespoke integrations and local workarounds, which can create fragility and hinder interoperability.
A policy-centered cross‑domain digital infrastructure addresses these challenges directly. By integrating UTM services, public safety dispatch systems, municipal data feeds, and aviation surveillance into a unified framework, DFR operations can scale without compromising safety or efficiency. Importantly, this infrastructure also enables equitable access. 46
The Cost of Continued Fragmentation
Maintaining a siloed approach to transportation modernization carries tangible risks. Fragmented infrastructure investments can lead to incompatible systems, regulatory rework, and delayed deployment of beneficial technologies. Misaligned policies may force agencies to retrofit safety and security measures after systems are already in operation, increasing cost and eroding public trust.47
A prime example of the potential cost of this fragmentation is the persistent insistence by government and industry UAS “experts” that ADS-B is the solution for electronic conspicuity in the low-altitude economy. The FAA’s own data reveals that between 65% and 75% of the U.S. lacks ADS-B coverage at 500 feet above ground level (AGL) and below, which is the core of the low-altitude economy.48 Since current ADS-B stations are spaced to maximize coverage at 10,000 feet and above, the lack of coverage at low levels is not an oversight but a design consequence. The cost of closing this gap with air-domain-centric ADS-B ranges up to $4.5 billion and would take 10-12 years to complete. However, integrating existing technologies that currently serve smart cities, assisted and autonomous vehicles, and personal connectivity requirements could significantly reduce the cost and time to close these gaps.49

Conversely, a cross‑domain digital infrastructure strategy offers a path to scalable safety, efficient certification, and resilient operations. By designing shared services and governance frameworks upfront, policymakers and industry can reduce duplication, accelerate innovation, and ensure that autonomy enhances rather than undermines system performance.
Designing Once, Scaling Everywhere = “Better, Faster, Cheaper, Safer”
The policy signals are clear. DOT’s TDI initiative, NASA’s ATMS research, and FAA’s operational frameworks all converge on the same conclusion: the future of transportation, autonomy, safety, security, and prosperity lies at the infrastructure layer. Vehicles will continue to evolve, but it is the digital systems that connect them across air, ground, and the built environment that will determine whether the United States maintains leadership in transportation innovation.
Breaking the old, stratified domain approach is about recognizing that safety, trust, and scalability are emergent properties of integrated systems. Designing digital infrastructure once, with cross‑domain interoperability in mind, allows those properties to scale everywhere.
Conclusion: Integration Is No Longer Optional
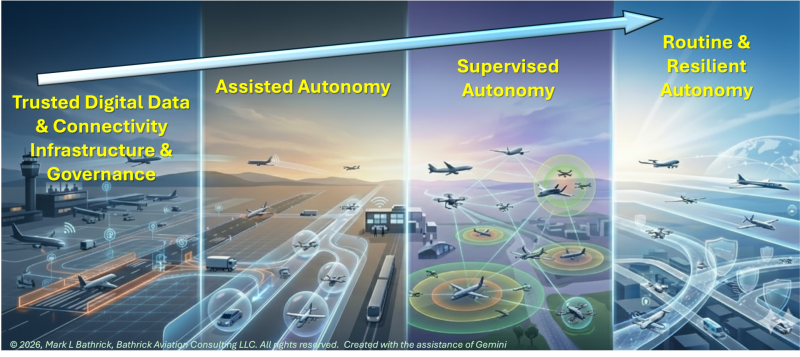
The expansion of low‑altitude operations, the maturation of autonomous systems from assistive to supervised, to routine and resilient, and the growing reliance on digital services have fundamentally altered the transportation landscape. Safety, security, and economic prosperity through rapid scaling now emerge from integration, not isolation.
Cross‑domain digital infrastructure is the connective tissue that allows C‑UAS systems to protect civilian airspace without undue risk, enables DFR programs to scale equitably, and ensures that autonomy enhances rather than undermines public trust.50 51 Federal policy has begun to recognize this reality, but implementation must move beyond modal boundaries and institutional silos.
The question has evolved from whether to integrate to whether we will intentionally integrate to shape the outcome or face the costly and time-consuming consequences of neglecting what needs to be done.

Reference Sources:










Comments