

The Multi-Factor Convergence Driving the Need for Trusted Low Altitude Air Domain Awareness, Coordination, and Collision Avoidance
The convergence of pending routine unmanned aircraft system (UAS) beyond visual line of sight (BVLOS) integration, the FAA’s surprise homeland security driven “mobile asset” temporary flight restriction (TFR) NOTAM,1 the rapid counter UAS (C-UAS) expansion, and heightened public scrutiny following unresolved drone sightings and high visibility airspace disruptions has amplified the need for trusted low altitude air domain awareness. The 2024 surge in drone sightings in New Jersey2 3 and the February 2026 El Paso airspace and airport shutdown, triggered by counter UAS activity near a major commercial airport, both faced conflicting explanations from the federal government.4 5 6
This rapid escalation of uncertainty regarding airborne objects, their operators, and the authorities responsible for action had significant safety, medical, and economic repercussions.7 Consistent reporting has underscored that inconsistent information, fragmented authorities, potential data misuse,8 and opaque decision making erode public trust in the safety and stewardship of the NAS.9 As C-UAS systems proliferate through federal grant programs10 and expanded statutory authorities, the absence of a shared, trusted, and aviation safe air domain awareness picture at low altitude increases the likelihood of precautionary shutdowns, misidentification events, and reactive regulatory responses.11
In this environment, public faith in the low altitude economy, spanning drone delivery, emergency response, infrastructure inspection, and future advanced air mobility (AAM) concepts, depends not only on preventing collisions, but on providing credible, transparent, and authoritative awareness of what is operating in the airspace and why.12
Low‑Altitude Airspace is not “Structured” – it is Emergent and Poses Fundamentally Different Awareness, Coordination, and Collision Avoidance Challenges
For decades, coordination, collision avoidance and separation assurance concepts were developed around a relatively small number of cooperative, crewed aircraft operating along predictable routes, at standardized altitudes, and under continuous air traffic control oversight. Those assumptions no longer hold. Under Part 108 and related regulatory initiatives, the National Airspace System is being asked to accommodate large numbers of small, highly maneuverable aircraft operating beyond visual line of sight, often near crewed aircraft and in environments where traditional surveillance and communications infrastructure is limited or absent.13
Domain awareness, aircraft coordination and collision challenges in the emerging low‑altitude and beyond visual line of sight (BVLOS) environment are not scaled‑down versions of traditional crewed aviation risk, they are categorically different. The assumptions that underpin “see and avoid” and its technological analogs were forged in an airspace characterized by altitude stratification, predictable traffic flows, professional pilots, and centralized air traffic control. None of those assumptions reliably hold below 1,000 feet AGL.14
Low‑altitude airspace will be increasingly dense, heterogeneous, and operationally chaotic. It includes crewed aircraft operating under visual flight rules (VFR), public safety helicopters, agricultural aircraft, military training flights, gliders, balloons, and an expanding population of unmanned aircraft systems (UAS), all with widely varying performance characteristics and equipage mandates.15 Traffic density here is episodic rather than continuous and largely scheduled, driven by weather, on-demand emergency response, infrastructure inspection cycles, and commercial demand spikes.
In such an environment, the absence of a persistent, trusted low altitude air domain picture complicates not only real time safety management, but also the FAA’s ability to retrospectively assess reported drone sightings, determine operator compliance, and distinguish lawful operations from unauthorized or malicious activity. Unlike controlled airspace, separation is not assured by procedural design, it is emergent and fragile.16
Those who assume that the low‑altitude economy will ultimately be organized into rigid, trajectory‑based flows are not engaging with the operational reality of the airspace they seek to regulate. That view abstracts away the broad spectrum of commercial, private, and public safety missions that define low‑altitude operations, including air ambulances diverting without notice, law enforcement aircraft responding to unfolding events, agricultural flights tied to weather and terrain, recreational aviation, infrastructure inspection, and an emerging diversity of UAS missions that are inherently opportunistic rather than scheduled.17
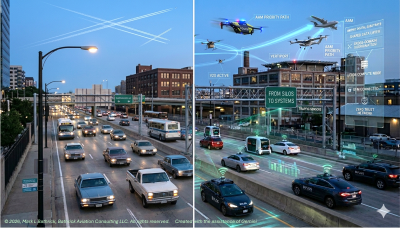
The belief that this complexity can be safely compressed into orderly corridors reflects a theoretical construct, not lived experience. One only needs to observe our ground transportation system to see the glaring flaw in this assumption: for more than a century, an extraordinarily diverse mix of vehicles, users, purposes, and performance characteristics has safely coexisted on roads not through rigid trajectories, but through shared rules, mutual awareness, dynamic negotiation, and layered safety mechanisms. Low‑altitude airspace is no less diverse, no less dynamic, and no more amenable to being engineered into tidy flows simply because it is airborne rather than terrestrial.
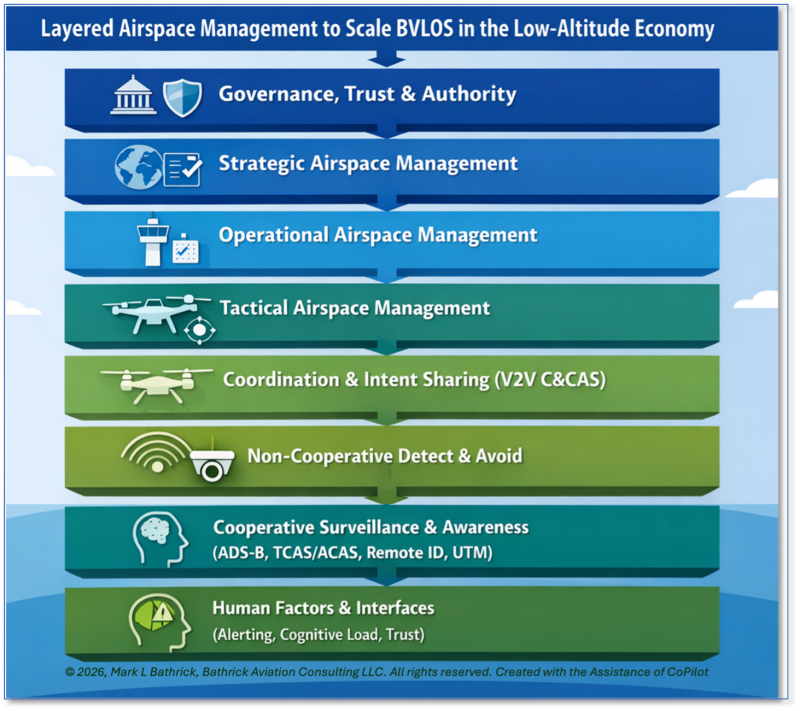
In traditional, higher-altitude airspace, most flights operate within a largely “directive” management framework. This framework is tightly controlled through centralized services, where separation assurance is primarily provided by external authorities and standardized procedures.
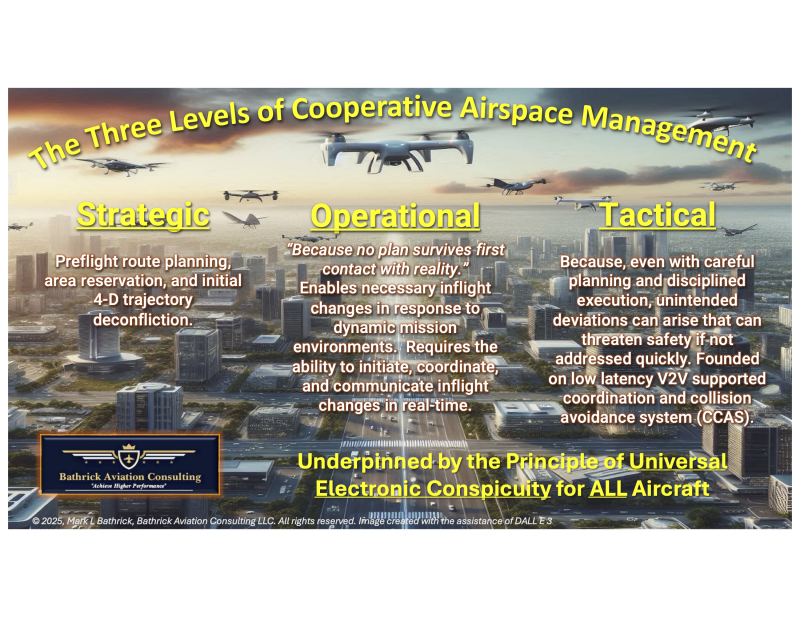
In contrast, in the FAA’s federated cooperative model for the future low‑altitude airspace, airspace management is structured around two familiar layers: Strategic (preflight route planning, area reservation, and 4‑D trajectory deconfliction for approvals) and Operational (timely inflight coordination and communication of mission-driven changes when “no plan survives first contact with reality”). The operational layer handles emergent deviation requests that are relatively few compared to the totality of traffic managed in traditional controlled airspace.
But because the FAA’s low‑altitude approach is cooperative rather than directive and depends on electronic conspicuity among diverse and dynamic use cases (e.g., drone as a first responder DFR), it necessitates a third, Tactical level: a last‑defense, real‑time capability to coordinate and deconflict when unexpected situations and human deviations arise, such as when cooperative aircraft deviate and become collision threats or when non‑cooperative aircraft must also be accommodated. This level requires low‑latency, highly reliable communications and risk calculation that traditional systems do not provide.
BVLOS operations amplify these risks. Once the pilot or remote operator is removed from direct visual contact, coordination and collision avoidance becomes a mediated function of sensors, networks, displays, and human‑machine interfaces. The prevailing regulatory and industry response has been to pursue increasingly sophisticated onboard and offboard Detect and Avoid (DAA) sensors like radar, electro‑optical/infrared (EO/IR), acoustic, radio frequency (RF), ADS‑B In, ground‑based surveillance, and networked traffic services.18 The implicit assumption is that if sensors are good enough, safety will follow.19
That assumption is flawed.
Operational, Human Factors, and Surveillance Evidence from Low‑Altitude Operations
Operational experience from both crewed and uncrewed aviation consistently reveals structural limitations in sensor‑centric detect‑and‑avoid (DAA) and cooperative surveillance systems when applied to low‑altitude airspace. These limitations are not isolated anomalies but recurring characteristics of the operating environment in which BVLOS operations are expected to scale.
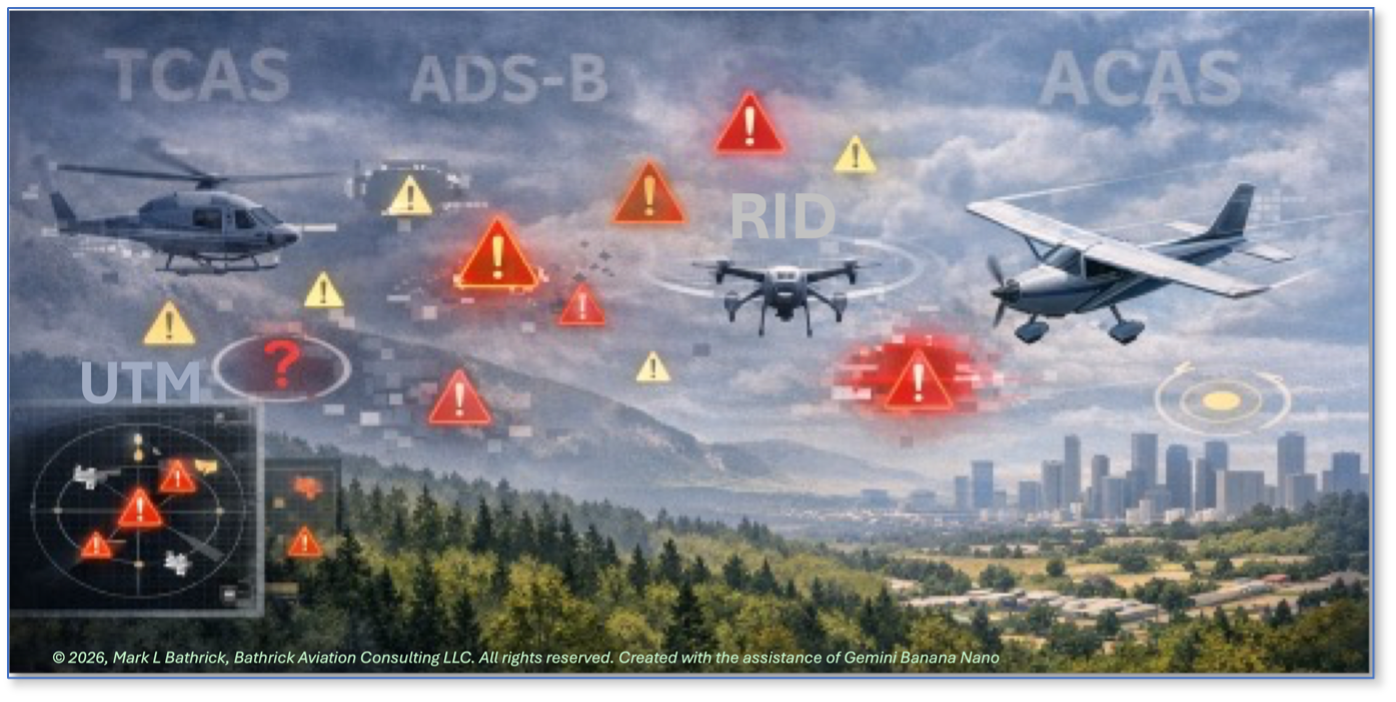
Cooperative surveillance systems such as TCAS, ACAS, and ADS-B depend fundamentally on the presence of compliant, transmitting aircraft. In low‑altitude Class G airspace, that assumption routinely fails. Many crewed aircraft, particularly helicopters, gliders, agricultural aircraft, and public aircraft operating under special authorizations, either lack transponders or operate under equipage exemptions. Small uncrewed aircraft, meanwhile, are generally prohibited from transmitting ADS‑B Out, eliminating any realistic path to universal cooperative visibility.20 Emerging constructs such as Remote ID (RID)21 and UTM are frequently cited as mitigating measures, yet neither was designed to provide the low‑latency, intent‑aware coordination required for tactical collision avoidance.22
Remote ID serves primarily as an identification and compliance mechanism,23 while UTM architectures rely on persistent connectivity and centralized services that cannot be assumed in the environments where BVLOS demand is greatest.24 While Remote ID and UTM provide important identification and strategic awareness functions, their design focus does not support the low latency, intent aware correlation needed to generate a coherent, time synchronized air domain picture suitable for FAA investigations or interagency threat assessment in complex, fast moving scenarios.
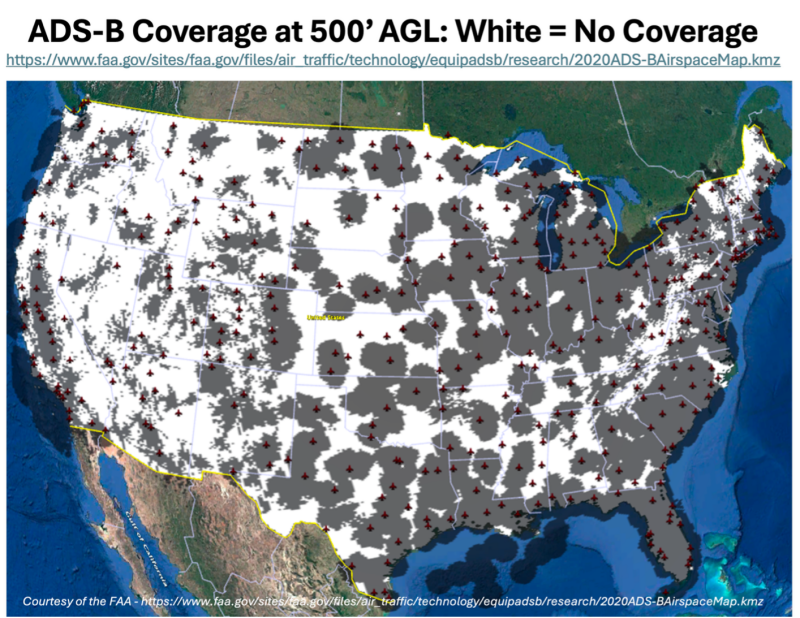
Even when cooperative signals are available, surveillance performance degrades rapidly near the surface. Terrain masking, buildings, vegetation, smoke, and infrastructure clutter interrupt line‑of‑sight reception and create operationally significant coverage gaps. FAA and NASA studies have repeatedly documented reduced ADS‑B coverage and reliability below approximately 500 feet AGL, particularly outside terminal areas and in rural or mountainous regions, precisely the environments central to DFR, wildland fire, weather disaster response, agriculture, and infrastructure inspection missions.
Sensor‑centric DAA systems face parallel constraints.25 26 Radar, electro‑optical, infrared, and acoustic sensors each provide valuable capabilities, but none offer comprehensive coverage across all lighting, weather, and clutter conditions.27 28 This aligns with lived operational experience. As a Navy fighter pilot flying the F-14, I was equipped with one of the most capable airborne radars of its era, able to detect targets out to 150 nautical miles and track two dozen aircraft simultaneously. Yet even with that capability, false targets could appear and aircraft could still go undetected due to geometry, clutter, or task saturation. This became even more prevalent at low altitudes. Radar, like other aircraft detection technologies is a powerful aid, but never a guarantee.

Sensor fusion can mitigate individual weaknesses, but it also increases system complexity, cost, and integration burden. More critically, sensing alone does not resolve the challenge of intent. Detecting another aircraft’s presence does not necessarily provide sufficient information to predict its future trajectory or to generate mutually compatible avoidance maneuvers in time‑critical encounters.
Human‑factors evidence reinforces these concerns. Both pilots and remote operators are susceptible to alert fatigue when presented with frequent, ambiguous, or nondirective advisories. In low‑altitude environments characterized by high traffic density and dynamic maneuvering, nuisance alerts become common.29 Operational experience shows that crews respond predictably, by inhibiting alerts, discounting warnings, or relying on informal coordination methods, a situation I have personally experienced as a pilot. Accident‑prevention bulletins and safety reviews have repeatedly identified this pattern as a systemic risk rather than an individual failure.
Taken together, these findings point to a consistent conclusion: situational awareness alone does not scale. As traffic density increases, awareness‑centric safety models impose a growing cognitive burden on human operators, while providing diminishing returns in collision risk reduction. Without a complementary mechanism for coordination and intent sharing, the safety case becomes increasingly fragile as low‑altitude operations expand.30 31
Why Legacy Surveillance and Sensor‑Centric DAA Cannot Scale, and the Role of Vehicle-to-Vehicle (V2V) Coordination & Collision Avoidance Systems (C&CAS)
The limitations described above reflect a deeper structural mismatch between legacy aviation safety constructs and the realities of dense, low‑altitude airspace.32 Systems such as TCAS, ACAS, and ADS‑B were designed to reduce collision risk in comparatively sparse, cooperative, and higher‑altitude environments.33 As operations migrate downward and continue to scale outward under Part 108, these systems are increasingly being asked to perform functions beyond their original design intent.34 35
At their core, legacy cooperative surveillance systems assume that collision threats are electronically visible and that alerting logic can rely on predictable flight profiles and standardized separation norms. In low‑altitude Class G airspace, those assumptions frequently fail. Legally non‑cooperative aircraft are not exceptions but persistent features of the operating environment, and operational geometries are characterized by orbiting, loitering, rapid retasking, and tight vertical spacing.36
In such contexts, legacy alerting logic predictably produces nuisance advisories, which crews manage by inhibiting or discounting alerts, further eroding safety margins. From an investigative perspective, ambiguous or degraded surveillance data also undermines confidence in pilot reports and public sightings, increasing the likelihood of precautionary airspace restrictions when authoritative, correlated information is unavailable to quickly validate or dismiss perceived threats.
Infrastructure dependence compounds these challenges and costs. Traditional surveillance and traffic‑management concepts assume persistent connectivity to ground stations, ATC facilities, or centralized network services. Yet many of the missions driving BVLOS demand, from wildland fire, disaster response, rural inspection, and emergency operations occur in areas with intermittent or nonexistent communications infrastructure. In these environments, reliance on centralized services introduces single points of failure that cannot be mitigated through incremental improvements in sensor performance.37
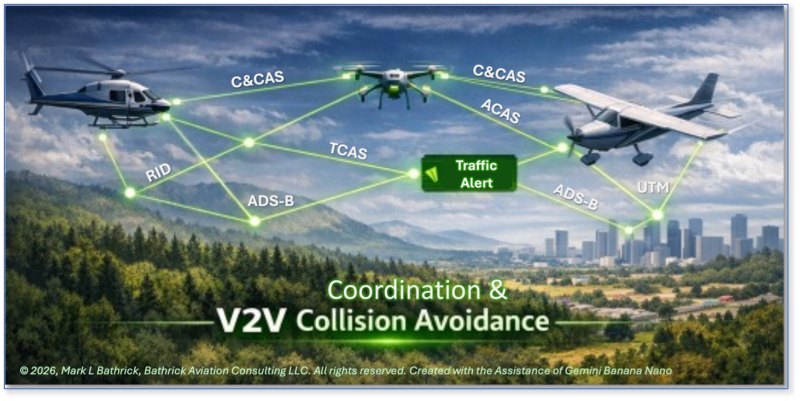
V2V coordination and collision avoidance systems (C&CAS) address these gaps by shifting the safety backbone from surveillance to coordination.38 Rather than attempting to sense every potential threat through increasingly complex sensors or centralized networks, V2V‑based systems enable participating aircraft to exchange precise state vectors, position, velocity, and intent, directly and with very low latency.39 This peer‑to‑peer architecture does not depend on ground infrastructure and does not require universal equipage with legacy transponders.
Equally important, coordination‑centric systems are designed around selective, threat‑based alerting. By generating directive cues only when a genuine collision risk exists, they reduce alert fatigue and support predictable, mutually compatible avoidance behavior.40 Flight demonstrations in mixed crewed‑and‑uncrewed environments, including public safety and wildfire operations, have shown that such systems can support close‑proximity operations with low false‑alert rates, even in dynamic and cluttered airspace.
From a regulatory perspective, this approach aligns closely with NASA’s Digital Flight and Required Conflict Management Performance frameworks, which emphasize performance‑based separation assurance rather than equipage‑centric mandates.41 42 A V2V‑based coordination layer provides the tactical conflict‑management capability that legacy systems lack: low‑latency, infrastructure‑independent coordination capable of supporting dense, heterogeneous operations without overwhelming human operators.
Comparative Assessment of Awareness‑Centric and Coordination‑Centric Architectures
When evaluated against the operational demands of low‑altitude, high‑density airspace, detect‑and‑avoid approaches fall into three broad architectural categories: sensor‑centric DAA, cooperative surveillance‑based systems, and coordination‑centric architectures. Each offers distinct strengths, but their scalability characteristics differ markedly.
Sensor‑centric DAA systems provide autonomy from external infrastructure and can detect non‑cooperative traffic under favorable conditions. However, their performance is highly sensitive to environmental factors such as lighting, weather, terrain, and clutter. Detection ranges are often limited, false positives increase in complex environments, and the absence of reliable intent information constrains the ability to generate timely, compatible avoidance maneuvers.
Cooperative surveillance‑based systems excel where equipage is widespread and coverage is reliable. They provide standardized alerting logic and benefit from decades of operational experience in controlled airspace. Yet their dependence on compliant transmitters, predictable flight profiles, and ground infrastructure limits their effectiveness in low‑altitude, mixed‑equipage environments. As traffic density increases, nuisance alerting and human‑factor strains become dominant concerns.
Coordination‑centric architectures take a fundamentally different approach. V2V‑based coordination systems operate with low latency, do not require centralized infrastructure, and can generate directive, threat‑specific advisories that reduce cognitive load and support predictable behavior across heterogeneous platforms. By enabling direct exchange of state and intent information between participating aircraft, they support proactive separation management rather than reactive conflict detection. They also create the foundation for a continuously updated, authoritative low altitude air domain picture, one that can support FAA enforcement and investigation activities, inform interagency infrastructure protection missions, and be rendered as a web based situational display for pilots using connected cockpit tools such as tablet-based electronic flight bags (EFBs).
Notable attributes of V2V C&CAS across various stakeholders include:43
- Decentralized, autonomous operation
Operates aircraft‑to‑aircraft without reliance on centralized infrastructure, eliminating connectivity constraints, reducing latency, and avoiding single‑point failures. - Low‑latency, high‑reliability V2V communications
Direct, short‑range V2V links enable high update rates, low power usage, minimal latency, and reduced risk of interference or dropped messages compared to centralized systems. - Spherical, all‑around surveillance
Provides continuous 360° awareness, receiving and processing data from all proximate aircraft, unconstrained by limited sensor fields of regard. - 4‑D trajectory exchange and intent awareness
Transmits and receives precise four‑dimensional position and velocity vectors to identify coordination candidates, collision threats, and optimal avoidance maneuvers. - Multi‑source data fusion
Ingests and utilizes both V2V C&CAS data and legacy surveillance sources (e.g., ADS‑B, TCAS, ACAS, RID, UTM), maintaining collision avoidance assurance while enabling reduced safe separation when direct V2V data is available. - Progressive conflict awareness and coordination
Identifies and displays potential conflicts early as information items—before alerts are required—allowing decentralized pilot or remote‑pilot coordination and reducing the likelihood of last‑moment, high‑risk maneuvers. - Reduced alert fatigue with heads‑out operation
Alerts only on true coordination or collision threats, using aural maneuver guidance and minimal visual cues to support heads‑out piloting. - Integrated visual and auditory guidance
Provides visual depiction of aircraft entering the “sphere of interest,” along with visual and aural alerts and recommended 3‑D maneuvers that respect aircraft performance limits and ground‑avoidance constraints. - Display and system integration ready
Designed for integration into existing cockpit, ground control, HUD, and piloting system displays. - Decentralized Density Control (DDC)
Enables aircraft to self‑manage local traffic density, actively controlling separation and reducing congestion around own ship. - Compact, SWaP‑ and cost‑efficient
Optimized for low size, weight, power consumption, and price, supporting scalable deployment across crewed and uncrewed platforms. - Friendly/hostile discrimination capability
Supports C-UAS operations by distinguishing cooperative (“friendly”) aircraft from non‑cooperative or potentially hostile ones, even at extremely close proximity. - Enables complex and constrained airspace operations
Supports safe UAS and crewed operations in and near airports, dense urban environments, and mixed‑fleet public safety missions involving helicopters, drones, and UAS interceptors. - Foundation for scalable UAS and AAM growth
The only technology class capable of enabling large‑scale sUAS growth and dense AAM operations with widely distributed vertiports in urban environments.
Table 1 - V2V C&CAS - Executive Operational Benefits Matrix
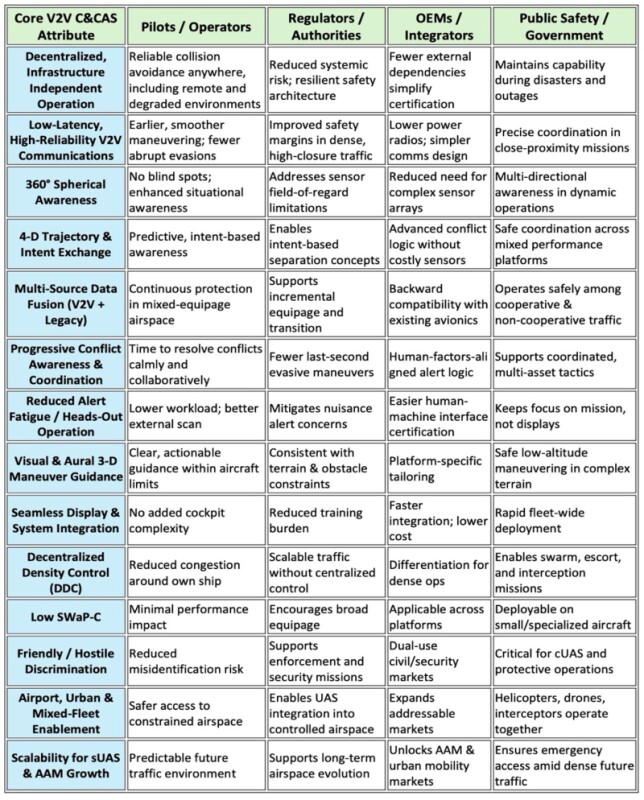
Critically, coordination‑centric systems do not require universal participation to deliver value. Even partial equipage can significantly reduce collision risk among participating aircraft, while legacy sensors and surveillance systems continue to provide coverage for non‑participating traffic. This layered, incremental deployment model aligns with emerging regulatory thinking and offers a more scalable path forward as Part 108 operations transition from isolated demonstrations to routine, high‑tempo missions.
Credibility, Readiness, and Regulatory Alignment
Any proposed evolution in collision avoidance and separation assurance must be evaluated not only on conceptual merit, but on operational credibility and regulatory feasibility. For coordination‑centric architectures such as V2V‑based collision avoidance and coordination systems, the question is not whether they replace existing safety mechanisms, but whether they can be credibly integrated into the layered safety framework that regulators expect.44
From a technology‑readiness perspective, V2V coordination is no longer speculative.45 Peer‑to‑peer communications, low‑latency data exchange, and distributed conflict‑resolution algorithms have been demonstrated across multiple aviation domains.46 In mixed crewed‑and‑uncrewed flight tests, these systems have shown the ability to support close‑proximity operations with predictable behavior and low false‑alert rates, even in environments characterized by terrain masking, intermittent connectivity, and dynamic maneuvering.47 Importantly, these demonstrations have occurred without reliance on centralized infrastructure, reinforcing the suitability of coordination‑centric approaches for rural, disaster‑response, and public‑safety missions.48
Regulatory alignment further strengthens the case. NASA’s Digital Flight and Required Conflict Management Performance frameworks emphasize performance‑based outcomes rather than prescriptive equipage mandates. These models recognize that scalable autonomy requires distributed responsibility for separation assurance, with clearly defined performance thresholds and interoperability expectations. A V2V‑based C&CAS fits naturally within this paradigm, providing a tactical conflict‑management layer that can be evaluated, certified, and incrementally deployed without requiring universal participation from day one.
This incremental deployability is critical. Unlike cooperative surveillance systems that derive value only when equipage is widespread, coordination‑centric systems provide immediate safety benefits among participating aircraft while coexisting with legacy sensors and surveillance. This characteristic aligns with FAA risk‑based approval pathways and supports phased adoption under Part 108, rather than forcing premature, system‑wide mandates.
Equally important is the human‑factors dimension. By generating selective, directive advisories only when genuine collision risk exists, coordination‑centric systems reduce cognitive load and support operator trust. This directly addresses one of the most persistent concerns raised by regulators and safety analysts: that increasing automation and alerting complexity may inadvertently degrade safety by overwhelming human decision‑makers. In this respect, V2V coordination is not merely a technical enhancement, but a human‑centered design response to the realities of low‑altitude operations.
Trust, Not Just Detection, Is the Scaling Constraint
The events that framed the opening of this article, the sudden imposition of homeland‑security‑driven TFRs, the rapid expansion of counter‑UAS authorities, and highly visible airspace disruptions accompanied by conflicting official explanations are not anomalies.49 They are early indicators of what occurs when low‑altitude airspace becomes operationally dense faster than our ability to clearly identify, coordinate, and explain what is operating there and why.
In both the New Jersey drone sightings and the El Paso airport shutdown, the most consequential failure was not a midair collision, but a collapse of shared understanding and public trust: uncertainty over aircraft identity, intent, authority, and appropriate response. That uncertainty translated directly into precautionary shutdowns, medical and economic disruption, and diminished public confidence in the stewardship of the National Airspace System.
The analysis throughout this article demonstrates why incremental improvements to sensor‑centric detect‑and‑avoid and legacy surveillance systems cannot resolve this challenge. In low‑altitude, mixed‑equipage environments, awareness without coordination produces ambiguity rather than assurance. Sensors may detect objects, but they do not reliably convey intent, enable mutual deconfliction, or support predictable behavior among heterogeneous users, particularly when infrastructure is degraded and authorities are fragmented. As C-UAS systems proliferate and routine BVLOS operations expand under Part 108, these gaps increasingly manifest not only as safety risks, but as governance failures that force reactive restrictions in the absence of trusted, aviation‑safe air domain awareness.
A coordination‑centric architecture that fuses V2V C&CAS with traditional legacy cooperative system inputs (e.g., ADS-B, RID, TCAS, UTM, etc.) and DAA technologies fundamentally changes that equation.50 By enabling low‑latency, peer‑to‑peer exchange of state and intent, V2V‑based coordination and collision avoidance systems provide the missing connective tissue between detection, decision‑making, and action.51 They reduce ambiguity at the tactical level, support compatible avoidance behavior among cooperative aircraft, and allow legacy sensors and counter‑UAS systems to be contextualized rather than over‑relied upon. Most importantly, they offer a credible path toward a shared, transparent, and authoritative understanding of low‑altitude airspace, one that supports safety, security, and public trust simultaneously.52

The future of the low‑altitude economy will not be determined solely by whether collisions can be prevented. It will be determined by whether regulators, operators, and the public can trust that airspace disruptions are justified, proportional, and informed by a coherent picture of what is actually occurring in the sky. Bridging the gap between awareness and coordination is therefore not just a technical evolution; it is a prerequisite for scaling BVLOS operations without repeating the cycle of uncertainty, shutdowns, and reactive regulation that now threatens to define the low‑altitude domain.









Comments