


As a leading provider of an open-source operating system for drones, Auterion has been able to help make drone technology make sense for companies of all types. That was evident with the announcement of the integration of the Auterion Enterprise PX4 operating system on GE Aviation’s Unmanned Aircraft System avionics platform, but can also be seen in their collaboration with Impossible Aerospace to bring to market the US-1 UAV. The company has helped organizations understand how enterprise drone programs can scale, but their most recent news is set to open up the technology in a whole new way.
At Interdrone 2019, Auterion announced the release of MAVSDK, a set of libraries in different programming languages (C++, Python, Swift, Java) that provide a high-level API to the MAVLink protocol for communication between a ground control station and drones, or the drone and a payload sensor. This new release makes it easier to develop applications in various programming languages.“Until today, customizing operations in the MAVLink protocol required a deep understanding of complex subjects such as embedded systems, drone dynamics, and the C++ programming language,” said Kevin Sartori, co-founder of Auterion. “With MAVSDK, any qualified mobile developer can write high-level code for complex operations, meaning more developers will be able to build custom applications and contribute to the community.”Lorenz Meier is also a co-Founder Auterion, and the development of MAVSDK is something that’s been on his radar for years. At Interdrone 2019, his keynote touched on the parallels of the early automotive industry with the drone industry of today and highlighted how important the development of standard bodies like ANSI that were created to help guide the industry.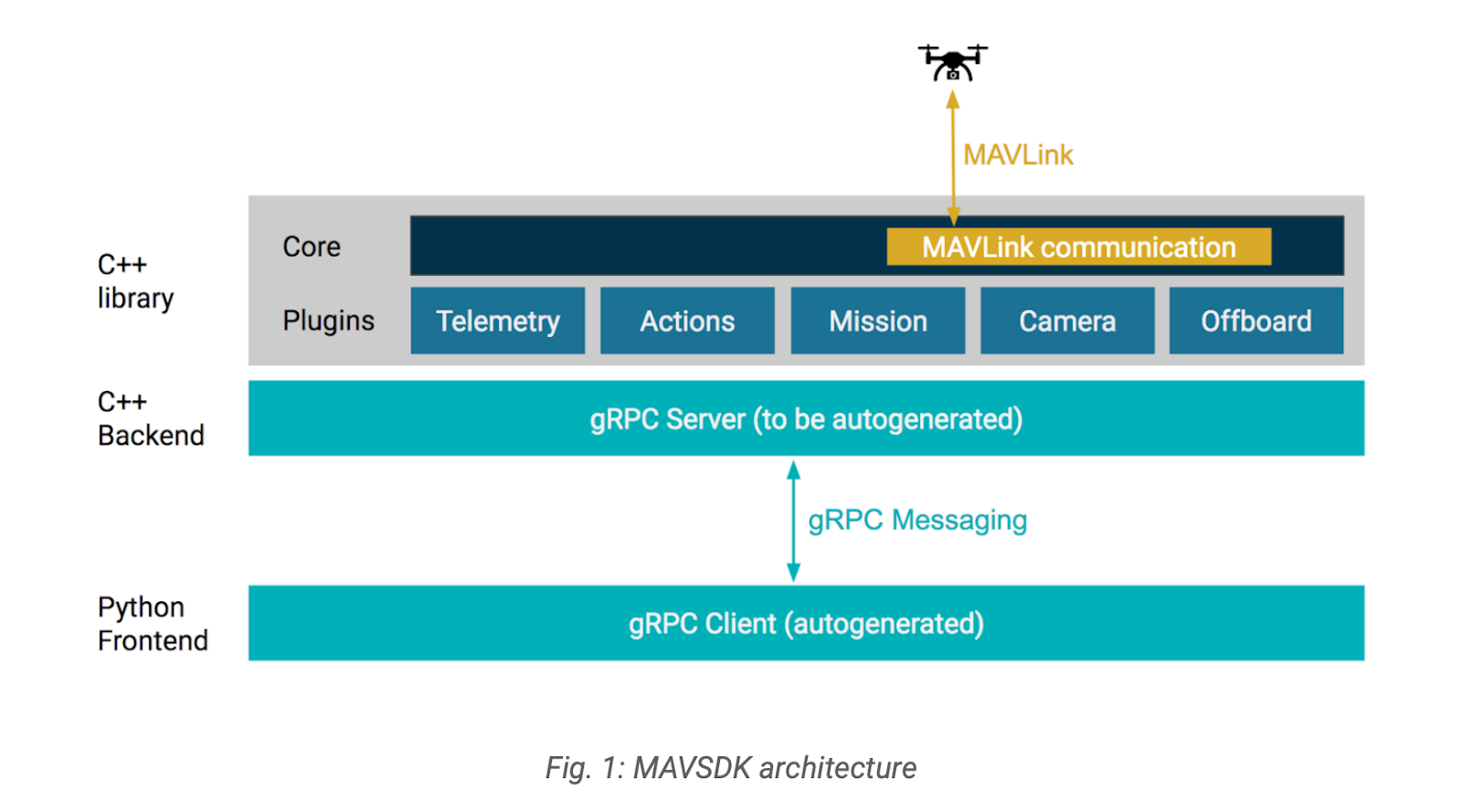 Implementation is tied to standardization, and that’s what the drone industry needs right now. Without it, we’ll continue to see companies create workflows and programs that cannot change or scale as needed. Meier tied this focus on standardization back to the projects he founded (PX4, MAVLink, QGC) and his company’s focus on the power of open source to build better software, align on common standards, and democratize the industry.“Everything we’re doing is about moving the workflow to the cloud,” Meier told Commercial UAV News. “This SDK is the first time you have access to the integration of a wide array of models in a more friendly architecture and that opens up all sorts of opportunities for companies that are building a drone program. We’ve been working on this for years, and the goal has always been to provide users with the ability to integrate the program directly into their cloud service because the long-term value is all about efficiency.”That efficiency is evident in how MAVSDK represents a more user-friendly API that can be cross-platform and supports multiple programming languages in a consistent manner. The open nature of the MAVSDK is also important to highlight and goes back to the core philosophy of the company. By enabling a grassroots approach to innovation by sharing and collaborating with different “actors” (service providers, manufacturers) on a common API without hindering them from diversifying and improving, Auterion is showcasing what it means to not only create open source software, but to also refine it, certify it and ensure that the benefits of doing so can be utilized by anyone in the drone community.In the creation of MAVSDK, Auterion has highlighted their understanding of the importance of a reliable and robust integration point to enable multiple use cases and accessing multiple payloads. In doing so, they’re set to further enable the adoption of drone technology at scale.For more information on how to use MAVSDK visit: http://mavsdk.io
Implementation is tied to standardization, and that’s what the drone industry needs right now. Without it, we’ll continue to see companies create workflows and programs that cannot change or scale as needed. Meier tied this focus on standardization back to the projects he founded (PX4, MAVLink, QGC) and his company’s focus on the power of open source to build better software, align on common standards, and democratize the industry.“Everything we’re doing is about moving the workflow to the cloud,” Meier told Commercial UAV News. “This SDK is the first time you have access to the integration of a wide array of models in a more friendly architecture and that opens up all sorts of opportunities for companies that are building a drone program. We’ve been working on this for years, and the goal has always been to provide users with the ability to integrate the program directly into their cloud service because the long-term value is all about efficiency.”That efficiency is evident in how MAVSDK represents a more user-friendly API that can be cross-platform and supports multiple programming languages in a consistent manner. The open nature of the MAVSDK is also important to highlight and goes back to the core philosophy of the company. By enabling a grassroots approach to innovation by sharing and collaborating with different “actors” (service providers, manufacturers) on a common API without hindering them from diversifying and improving, Auterion is showcasing what it means to not only create open source software, but to also refine it, certify it and ensure that the benefits of doing so can be utilized by anyone in the drone community.In the creation of MAVSDK, Auterion has highlighted their understanding of the importance of a reliable and robust integration point to enable multiple use cases and accessing multiple payloads. In doing so, they’re set to further enable the adoption of drone technology at scale.For more information on how to use MAVSDK visit: http://mavsdk.io 










Comments