


It wasn’t all that long ago when using a lidar sensor on a UAV was little more than theory, something that might be shown in some demos but was not really common practice. Over the last decade, though, that has slowly shifted to the point where we are today, where many surveyors are expecting to not only be able to utilize a lidar payload but to have that system be accurate enough for consistent, real-world projects. In fact, many of today’s surveyors are looking for a level of ease that isn’t available in most cases, looking for an “easy button” of sorts to create an end-to-end workflow similar to what is used in photogrammetric workflows.
To get a better sense of both how far drone-based lidar surveying has come over the last decade and the gaps that still need to be closed, Commercial UAV News recently spoke with Joe Hutton, the director of inertial technology and airborne products with Applanix, owned by Trimble. Hutton brings a unique perspective to this conversation, having been with Applanix since the company’s founding in the 1990’s, and seeing the evolution in surveying technology in general over this time, including the beginning of commercialized lidar. As a provider of georeferencing and positioning technology that is used within lidar systems, Applanix also hears from both OEMs and end users, giving a full picture perspective to the state of drone-based lidar in today’s industry.
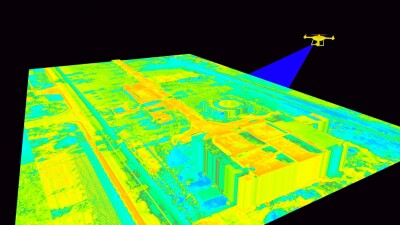
One of the interesting tidbits from the conversation was that, in Hutton’s experience, the most common use among his customers for drone-based lidar is for topographic mapping. This is the most traditional form of aerial lidar surveying, to be sure, but this work has traditionally been done with crewed aircraft. Although there may be some bias from Applanix’s customers working in this more traditional surveying space, it speaks to the rapid advancement in capability for drone-based lidar that it is being used so frequently for this type of project. This cuts across customers of all sizes, too, according to Hutton.
“We were talking to some surveyor companies, they’re small, medium enterprises, sometimes large-sized, and they said that’s only how they do topo mapping. Of all their traditional techniques, they only fly drones.”
Looking ahead, Hutton sees corridor mapping as the biggest emerging frontier for this technology among their customers, particularly as BVLOS operations become more regulated. Using crewed aircraft like helicopters is traditionally how these mapping projects have been done, but it is expensive, particularly when using a traditional fixed-wing airplane that needs a hole in the middle for the lidar sensor. Today’s lidar systems are strong enough for most projects’ needs – in fact, Hutton has heard of some customers using lidar pods adapted from drone use on light crewed aircraft like a Cessna – and regular BVLOS processes will help unlock a cheaper workflow.

That’s not to say that the industry has reached a panacea with respect to drone-based lidar, as there are still gaps that need to be filled. As Hutton puts it, many end users are still looking for that “easy button” to create a more simplistic workflow. The bottleneck today is with the software, particularly when compared to photogrammetric work.
“Lidar’s not quite there yet,” Hutton said. “People want that easy button for lidar. ‘I can fly their drone,’ as it’s trivial to fly a drone now, ‘so why do I have to wait hours or days to get my point cloud back?’”
The specific friction points are not always complex, but they add up. Setting up a base station incorrectly, or failing to tie it to the right datum, creates compounding downstream processing errors that can torpedo an otherwise clean dataset. Even when the data is collected correctly, integrating the lidar point cloud with imagery from the same payload remains a surprisingly manual process.
Part of the problem is that most lidar payload companies are, at their core, hardware companies. They can colorize a point cloud, but producing a seamless, deliverable-ready output is a different challenge altogether.
"The weakest link is the complete workflow software," Hutton explained. "Photogrammetry and lidar are still two distinct things, but the end users want them together, automatically." That gap is closing, but it remains the clearest dividing line between where drone-based lidar is today and where operators expect it to be.
The good news is that the industry is actively working to close that gap, and some of the solutions are already in the field. Two developments in particular are converging to make that easy button more of a reality: base-station-free corrections and real-time edge processing.
On the corrections side, Applanix's APX RTX product is designed to eliminate the base station problem entirely, using a correction service that has evolved to the point where it delivers centimeter-level position accuracy on a drone in flight. There are trade-offs — roll and pitch perform well in real time, while heading accuracy is better resolved in post-processing — but for many common field questions like volume calculations or slope stability assessments at a mine site, the in-flight data is already actionable.
The licensing model has been redesigned with the operator in mind as well, with the RTX license embedded in the drone itself, unlocking processing on any machine without additional license management overhead. On the processing side, edge computing has advanced to the point where some operators are receiving a point cloud before the drone has even landed.

"We use RTX, and RTX has evolved to the point where it actually works on drones," Hutton said. "Customers putting those in their drones can get real-time point clouds now with edge compute."
That is a meaningful shift for an industry that has long accepted long processing delays as simply part of the workflow.
Of course, the existence of a solution and the adoption of that solution are two different things, and Hutton is candid about the fact that even proven technology takes time to earn trust in this industry. RTX for UAV applications has been available for two to three years and is, by his own account, only now starting to gain meaningful traction.
"It's the seeing is believing," he said. "You can get centimeter-level accuracy without a base station, but it takes showing that it works and the end users feeling comfortable with it."
Some of that hesitancy is simply professional caution in an industry where accuracy carries real liability. Surveyors who have built workflows around base stations and post-processing are not going to abandon them on the strength of a spec sheet. Interestingly, Hutton draws a parallel to the broader shift away from perpetual software licenses toward subscription models, another transition the survey industry resisted for years before slowly accepting. In both cases, the barrier is less about technical literacy and more about workflow inertia and a need to see the value proposition demonstrated repeatedly at the operator level before it becomes the new default.
Ultimately, Hutton's read on the state of drone-based lidar is an encouraging one, even if it comes with caveats. The hardware is meeting expectations, the georeferencing technology is there, and the processing tools are catching up. The remaining work is largely on the software side, and that work is happening quickly. This is driven in no small part by AI and edge computing, both of which are accelerating development timelines that would have taken years just a decade ago.
For operators who have been waiting for lidar to reach the same ease of use as photogrammetric workflows, that moment is closer than it has ever been. It may not be here yet, but the direction is clear. As Hutton put it: "The hardware is definitely meeting customer expectations. It's getting easier. But it's that software workflow, it's just not quite there. But it will get there very quickly." For an industry that has come this far in a relatively short time, that is not a particularly hard thing to believe.









Comments