


Replacing real-time positional correction, a PPK (Post-Processing Kinematic) software resolves errors and applies precision corrections following the completion of a mission. This advanced software not only enhances the overall quality of an acquisition but also addresses data loss incurred during surveys or installation errors. It proves to be a crucial tool, capable of saving the day.
Mainly used with high-end GNSS-aided INS systems, post-processing has evolved to be accessible across a spectrum of surveying applications:
- Hydrography
- Mobile Mapping
- UAV/Drone Mapping
- Photogrammetry
- Aerial Survey
- Testing & Ground Truth

How does Post-Processing Work in Inertial Navigation Systems (INS)?
In an Inertial Navigation System (INS), the setup involves an Inertial Measurement Unit (IMU) that incorporates gyroscopes, accelerometers, and the Global Navigation Satellite System (GNSS).
During real-time navigation the INS estimates position and attitude based on current and past data only. However, the accuracy achieved in real-time is 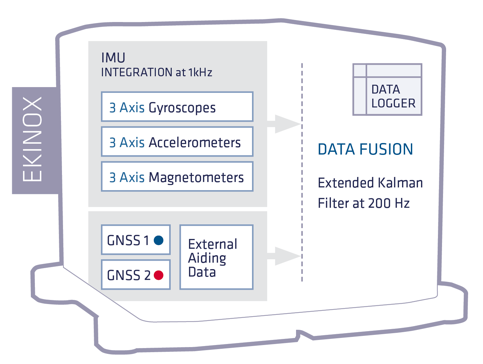 limited compared to what is possible through post-processing, where the entire survey data set is available.
limited compared to what is possible through post-processing, where the entire survey data set is available.
An INS fitted with a datalogger enables the implementation of post-processing. This allows for unique capabilities, such as the ability to analyze data backward, commencing from the end and progressing back to the beginning of the file. By combining forward and backward processing, accuracy is significantly enhanced compared to real-time analysis. Post-processing also allows a comprehensive examination of the complete data set, leading to improved precision and reliability of navigation parameters.
Post-Processing – Corrections
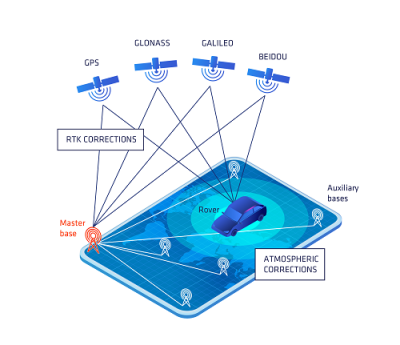
At the core of achieving precise GNSS-based positioning lies the implementation of correction solutions to enhance accuracy and integrity. Various correction types exist, but in scenarios where centimeter-level accuracy is imperative the two reliable options are 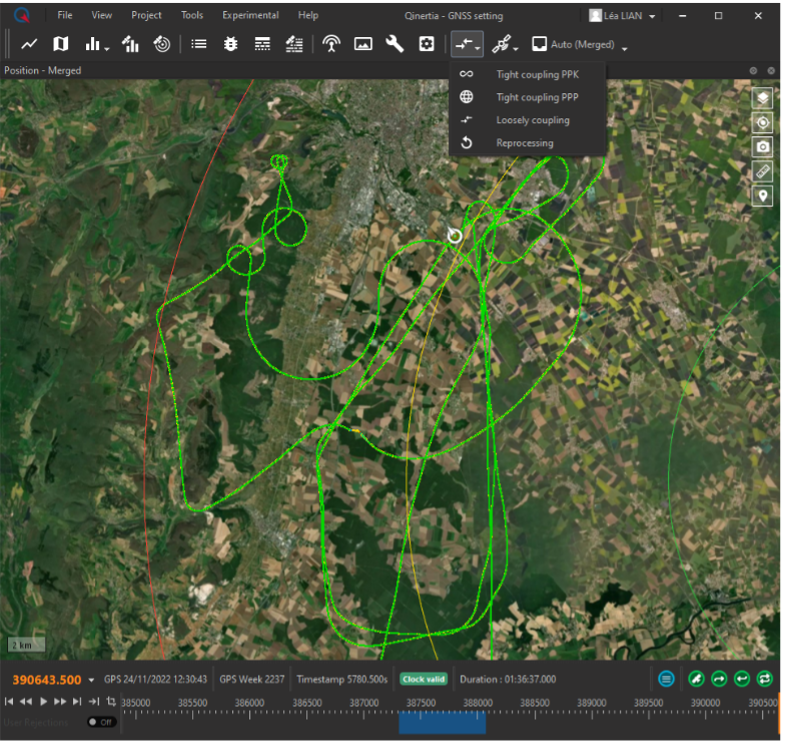 Real-Time Kinematics (RTK) and Precise Point Positioning (PPP).
Real-Time Kinematics (RTK) and Precise Point Positioning (PPP).
When exclusively working with real-time data, careful selection and configuration of the optimal correction method are essential prior to data acquisition. It is crucial to ensure that the correction data can be consistently obtained by the Inertial Navigation System (INS).
In contrast, when engaging in post-processing, these constraints are lifted. The ability to select and apply correction data after acquisition not only enhances correction reliability by eliminating data gaps but also contributes to cost reduction. Moreover, post-processing allows for informed decision-making in correction selection and tuning based on a comprehensive understanding of the conditions during acquisition. Factors such as atmospheric conditions, which significantly influence processing quality and are challenging to predict in real-time, can be addressed more effectively during post-processing, leveraging full knowledge of the acquisition conditions.
Acquisitions far from a base station: VBS and IonoShield
The distance between the base station and the rover drives the performance in RTK and PPK processing: the longer the distance, the lower the expected accuracy.
Qinertia leverages post-processing to offer two solutions to work around this issue: the Virtual Base Station (VBS) and IonoShield.
 How does VBS work?
How does VBS work?
VBS revolves around establishing a virtual network encompassing your project area, ensuring maximum, consistent, and robust position accuracy, especially when dealing with increased baseline distances affected by atmospheric disturbances.
In its operation, the VBS initially generates a map of atmospheric errors spanning the entire vehicle trajectory. These errors are then mitigated within the Qinertia PPK solution, ensuring a highly accurate navigation outcome, even in challenging conditions or during prolonged corridor surveys over considerable distances.
Learn more: https://www.sbg-systems.com/news/virtual-base-station-now-available-in-qinertia/
How does IonoShield mode work?
Ionoshield is an atmospheric error mitigation algorithm. It uses the observations on the base and on the rover to determine the errors introduced by the ionosphere and the troposphere. Ionoshield uses all available frequencies and constellations to estimate atmospheric errors and compensate them. An intelligent strategy minimizes the convergence time while the forward / backward / merge processing completes the process to target a zero-convergence time, even in challenging conditions.
Finally, the Ionoshield couples with the embedded RAIM algorithm to detect and exclude any faulty satellite due to ionospheric issues such as scintillation.
With this approach Ionoshield yields significant benefits:
- Unmatched capacity to reach RTK fix and exhibit centimetric accuracy.
- No added noise unlike other iono processing techniques such as ionofree combination.
- Takes full advantage of modern multi frequency receivers to increase precision & robustness using three frequencies full constellation PPK.
- Works even in land applications (light to medium urban environments).
Learn more: https://youtu.be/6Q6K36i9fLg
Post-Processing – Forward/Backward/Merge Algorithm
The illustration highlights the effectiveness of the forward, backward, and merge processing in boosting data accuracy.
In the forward phase, the position error grows rapidly until the GNSS signal returns after 60 seconds. Similarly, in the backward phase, the error increases until the GNSS signal is back at the 0-second mark. However, when we merge and smooth the data, the error is notably reduced, with the highest error occurring in the middle of the GNSS outage.
INS/GNSS Post-Processing Advantages
- Enhanced Accuracy in Ideal GNSS Conditions:
INS/GNSS Post-processing elevates accuracy even in optimal GNSS conditions, such as an open sky with no signal blockage and favorable atmospheric conditions. Utilizing the PPK forward/backward/merge algorithm can notably improve attitude accuracy (roll/pitch/heading) by around 30%. - Elimination of "Warm-Up" Phase:
By employing the PPK method, there is no longer a need for the "warm-up" phase typically associated with inertial devices. This phase, where internal errors are estimated using a reference, is bypassed through multiple pass processing. This allows for maximum accuracy right from the first second of data logging, eliminating the need for time-consuming warm-up periods. - Reduced Impact of GNSS Outage:
PPK significantly mitigates the impact of GNSS outages, enhancing performance and maximizing centimeter-level accuracy even in challenging conditions. The forward/backward processing further reduces the duration of outages by half. - Simplified Field set up and facilitate the data collection:
Direct download of correction data by Qinertia streamlines the field setup by eliminating the requirement to deploy a nearby base station. With over 10,000 base stations available worldwide (open access base stations and numerous CORS network), working on broader and more challenging areas becomes more accessible. - Extended Baseline and higher atmospheric disturbance tolerance:
The IonoShield mode and Virtual Base Station (VBS) mode within PPK software allow for longer baselines, corridor mapping and better handling of atmospheric disturbances. - Enhanced Quality Control:
PPK provides better quality control through informative graphs that facilitate easy assessment of measurement accuracy and GNSS signal quality. This aids in data analysis and enables improvements in payload or workflow. - Improved Reliability through versatile processing options and geodetic converter:
PPK offers multiple processing options, including PPK and PPP tight coupling. The geodetic converter seamlessly applies the necessary transformation to preconfigured Coordinate Reference Systems (CRS) based on the selected processing option. This versatility refines the final position estimation, enhancing overall reliability.
Why should geodetic conversion be considered in post-processing https://youtu.be/lqgmfT1Giko

Qinertia: Next-generation PPK software
Qinertia stands out as SBG Systems' proprietary GNSS (Global Navigation Satellite System) and INS (Inertial Navigation System) post-processing software, delivering a comprehensive array of features to refine precise navigation data.
- Open to third-party IMUs, a list of integrated third-party IMUs and support generic ASCII and/or binary file formats to input data and measurement.
- Post-process data from any GNSS receiver through RIN7EX and with binary files from Novatel, Septentrio, Trimble, and u-blox for a straightforward workflow.
- Build-in geodetic converter empowers you to effortlessly harness the essential reference systems and transformation for your project.
- Powerful base station management, up to 10,000 base stations available in Qinertia from 164 countries.
- Diverse preset motion profiles at your fingers to enhance the accuracy, including air, land, marine, and pedestrian…
- Multiple processing modes available.
More about Qinertia PPK Software: https://www.sbg-systems.com/products/qinertia/
Book a free one-on-one online demo of Qinertia NOW! https://outlook.office365.com/owa/calendar/[email protected]/bookings/s/07yts2TQ-kazBHJc4yf5VA2
About SBG Systems:
A leading supplier of innovative inertial sensors, SBG Systems manufactures and supports an extensive range of state-of-the-art inertial sensors, such as Inertial Measurement Units (IMU), Attitude and Heading Reference Systems (AHRS), and Inertial Navigation Systems with embedded GNSS (INS/GNSS).

.jpg.small.400x400.jpg)









Comments