


In the world of Unmanned Aerial Vehicles (UAVs), or drones, precise navigation is everything. The current popular approach relies on Attitude and Heading Reference Systems (AHRS) and/or Global Navigation Satellite Systems (GNSS) for navigation, but they are not without their limitations.
In urban environments, when operating UAVs close to walls or bridges, the accuracy of GNSS is reduced due to signal blockage and multipath. This can result in inaccurate positioning and navigation for UAVs, which can be both frustrating and potentially dangerous. The increase in jamming and spoofing incidents, particularly in response to geopolitical conflicts, has also made GNSS signals less reliable, putting military and surveillance drone missions at risk.
In such challenging conditions, having separate sensors for both position and attitude means that if you lose the GNSS signal, you also lose your position information.
To overcome these challenges and make UAV navigation more reliable and efficient, let's explore how multiple sensors can work together, a process known as multi-sensor fusion.
When computing position data, GNSS may not always be dependable in challenging environments, where signals may be weak or unavailable. To compensate for GNSS outages, it is essential to employ multi-fusion sensors. These sensors also provide information such as heading, velocity, position, roll, and pitch.
By combining data from different sensors (such as accelerometers, magnetometers, barometers, and true airspeed or ground speed) with Inertial Navigation Sensors (INS), allows INS to adapt to the ever-changing navigation landscape. Multi-sensor fusion ensures that UAVs can maintain a reliable and accurate navigation solution, ultimately enhancing their performance and safety.
All INS from SBG Systems, including models like Ekinox Micro and Quanta Series are embedded with an advanced sensor fusion algorithm. 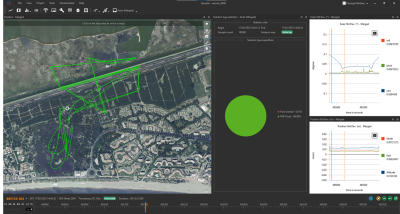 They come equipped with the following features: a blackbox data logger, Ethernet connectivity, a wide range of input and output options, as well as advanced synchronization capabilities. For enhanced accuracy, external aiding sensors like odometers, DVLs, or air data devices can be connected to the INS.
They come equipped with the following features: a blackbox data logger, Ethernet connectivity, a wide range of input and output options, as well as advanced synchronization capabilities. For enhanced accuracy, external aiding sensors like odometers, DVLs, or air data devices can be connected to the INS.
Let's focus on the SBG Systems Ekinox Micro and Quanta Series, surveyors' preferred choices for UAV applications due to its low SWaP-C (Size, Weight, and Power - Cost) characteristics.
The software used to improve the accuracy of UAV navigation is just as important as the hardware that computes the positional data.
SBG Systems' Qinertia is a software suitable for both post-processing and research and development purposes. It offers the ability to generate precise ground truth data through PPK/PPP forward and backward processing, as well as data merging.
It enables simulation by using the same algorithms as the hardware, with the flexibility to adjust parameters and the option to exclude GNSS and/or aiding data. It also provides advanced visualization tools for in-depth analysis of IMU and, particularly, GNSS data in log files. This software is highly recommended and efficiently serves the needs of UAV applications. Furthermore, Qinertia enables access to more than 10,000 reference stations worldwide with its extended CORS network support and even generates Virtual Base Stations (VBS) to ultimately achieve the highest levels of positioning accuracy through post-processing.
In conclusion, the use of data from multiple sensors through sensor fusion is the solution to the evolving challenges of UAV navigation. By combining data from various sources, UAVs can overcome the limitations of relying solely on AHRS or GNSS alone.
To improve accuracy and achieve better results, it is advisable to integrate high-quality sensor fusion and advanced navigation filtering into AHRS and GNSS/INS, rather than relying solely on the basic autopilot navigation component. This will enable them to navigate consistently and accurately in a wide range of environments, ensuring their reliability in various applications.










Comments